
Controladores Logicos Programables PLC:
Más conocido por sus siglas en nglés PLC (Programmable Logic Controller), es una computadora utilizada en la ingeniería automática o automatización industrial, para automatizar procesos electromecánicos, tales como el control de la maquinaria de la fábrica en líneas de montaje o atracciones mecánicas.
Los PLC son utilizados en muchas industrias y máquinas. A diferencia de las computadoras de propósito general, el PLC está diseñado para múltiples señales de entrada y de salida, rangos de temperatura ampliados, inmunidad al ruido eléctrico y resistencia a la vibración y al impacto. Los programas para el control de funcionamiento de la máquina se suelen almacenar en baterías copia de seguridad o en memorias no volátiles. Un PLC es un ejemplo de un sistema de tiempo real «duro», donde los resultados de salida deben ser producidos en respuesta a las condiciones de entrada dentro de un tiempo limitado, de lo contrario no producirá el resultado deseado.
Elementos de un Hadware de un PLC:
Como los ordenadores, el PLC, va a constar de dos partes fundamentales
-El HARDWARE que es la parte física o tangible del ordenador y del autómata
-El SOFTWARE es la parte que no es tangible: es el programa o programas que hacen que el ordenador o el autómata hagan un trabajo determinado
-El SOFTWARE es la parte que no es tangible: es el programa o programas que hacen que el ordenador o el autómata hagan un trabajo determinado
1.1) Hardware

El hardware del autómata, al ser básicamente un ordenador, podemos dividirlo de la siguiente forma:
- La F.A., o fuente de alimentación, provee a suministrar las distintas c.c. que necesitan los circuitos electrónicos del autómata para poder funcionar.
- La CPU, o Unidad de Control de Proceso, en la que va alojado el microprocesador (que es el cerebro del sistema) junto con los dispositivos necesarios para que éste realice su función: las tarjetas de memoria, el reloj, las VIAS (integrados que ayudan al microprocesador en sus tareas de comunicación con otros dispositivos), etc.
- Las tarjetas de entradas/salidas, o tarjetas I/O, en las que otros circuitos integrados se encargan de que el microprocesador sea capaz de comunicarse con otros dispositivos, ya sean éstos otros microprocesadores, un teclado, una pantalla, etc.

Modulo de Procesamiento:
El procesamiento de datos de cada crucero consiste en convertir los datos crudos en unidades científicas a partir de las cuales se calculan las variables de interés, y reducir el tamaño de las matrices de datos a una escala más manejable. Para el procesamiento de los datos se utiliza el paquete de programas SBEDataProcessing-Win32 (SeaBird Electronics, Inc.). A continuación se enumeran los pasos a seguir para realizar el procesamiento de datos del CTD modelo SEALOGGER SBE 25.

Diseño de Modulo de Comunicación:

Modulo de Comunicacion:
El módulo de comunicaciones se encarga de facilitar el envio y recepción de mensajes entre el programa servidor (y sus módulos) y los clientes. Además expone funcionalidades para la identificación de usuarios asi como para la obtención/modificación de los datos de estos.
ORGANIZACIÓN DE LA MEMORIA:
Históricamente el almacenamiento principal se ha considerado como un recurso costoso, por lo cual su utilización debía optimizarse. La memoria está dividida en primaria y secundaria. El traspaso de información entre éstas es la preocupación más grande del sistema; esta responsabilidad puede ser asignada al programador, pero ésto sería una gran pérdida de tiempo, por esto el sistema debe ocuparse de ello.
Por organización del almacenamiento se entiende la manera de considerar este almacenamiento:
· ¿ se coloca un solo programa de usuario o varios ?.
· Si se encuentran varios programas de usuario:
o ¿ se concede a cada uno la misma cantidad de espacio o se divide el almacenamiento en porciones o “particiones” de diferente tamaño ?.
o ¿ se utilizará un esquema rígido de número y tamaño de particiones o un esquema dinámico y adaptable ?.
o ¿ se requerirá que los trabajos de los usuarios sean diseñados para funcionar en una partición específica o se permitirá que se ejecuten en cualquiera donde quepan ?.
o ¿ se requerirá o no que cada trabajo sea colocado en un bloque contiguo de memoria ?

Comparacion de un RTU y un PLC:
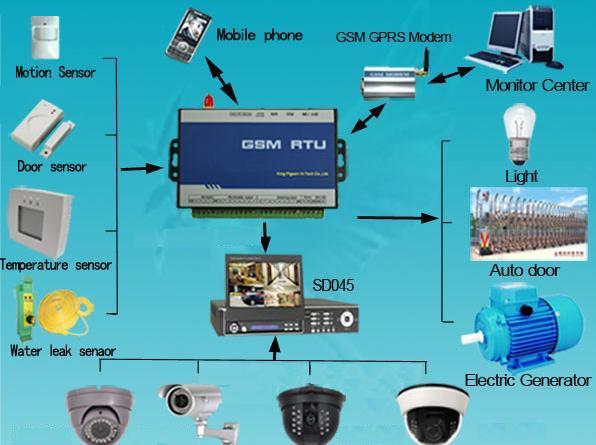
Para el sistema SCADA el uso de un tipo determinado de unidad remota responde a las necesidades e importancia del proceso a supervisar y/o controlar, en consecuencia de los elementos constitutivos del sistema se describen a continuación las unidades remotas: RTUs y PLC como elementos de suma importancia en la supervisión y/o control de las variables de un proceso determinado.
UNIDADES TERMINALES REMOTAS (RTUs)
El concepto de RTU se muestra a continuación:
La arquitectura de la unidad terminal remota consta típicamente de:
- Módulo de Entrada
- Módulo de Control
- Módulo de Procesamiento de Información (CPU)
- Módulo de Comunicaciones
- Módulo de Sincronización de Tiempo (GPS)
“Unidad terminal remota”, o RTU, es un término que ha sido usado en los sistemas de adquisición de datos y control supervisorio durante más de 20 años. Este término no concuerda tan bien con su significado funcional y se han realizado muchos intentos para desarrollar un título más descriptivo, sin embargo, a lo largo de estas líneas se mantendrá esta designación la cual describe una “caja negra” a través de la cual se adquiere la data (analógica y/o digital) de un proceso remoto.
Una unidad terminal remota tiene la capacidad de monitorear un número de entradas/salidas (I/O) relacionadas con un proceso, analizar y mantener datos en tiempo real, ejecutar algoritmos de control programados por el usuario, comunicarse con la estación maestra y en algunos casos, con otras remotas.
La RTU realiza una exploración periódica de las variables del proceso y, a través de un módulo de comunicación permite el intercambio de dicha información con una estación maestra (MTU) ubicada en una sala de control central, utilizando diversos medios de comunicación: línea telefónica, UHF/VHF, microondas, satélite, fibra óptica u otro medio, a través de puertos auxiliares con otras remotas y/o terminales portátiles. El protocolo de comunicación, estructura del mensaje y técnicas de corrección de errores son propias de cada fabricante.
La tecnología de estado sólido ha revolucionado el diseño electrónico de las RTUs en los últimos años, extendiéndose al uso de unidades microprocesadoras equipadas con memoria tipo de solo lectura y borrada electrónicamente (Electronic Erase Programmable Read Only Memory, EEPROM) y del tipo de Acceso Directo (Random Acces Memory, RAM) respaldada con batería de litio para salvaguardar la programación en caso de fallas eléctricas e incorporándoles una interfaz humano-máquina (HMI, Human Machine Interace), capacidades de comunicación con sistemas de medición, transductores, controladores lógicos programables (PLC), etc.
La CPU es la unidad controladora de todas las funciones de la unidad terminal remota, ya que dirige todas las transferencias de data entre los registros y las localidades de memoria, y controla las interrupciones de la interfaz de comunicación la cual envía la data de la RTU a la MTU. EL microprocesador de la RTU contiene una serie de registros destinados a almacenamiento temporal de instrucciones, direcciones de memoria y/o resultados de ciertas operaciones.
Esta unidad central de procesamiento es la encargada, como su nombre lo indica, de procesar la información adquirida del campo o transmitida por la MTU, con la finalidad de ejecutar la tarea correspondiente, bien sea una acción de control o de comunicación.
Las funciones de procesamiento de datos de la RTU se conocen en una secuencia determinada por el software de la misma. Los datos e instrucciones se almacenan en módulos de memoria RAM y/o ROM y las instrucciones del programa son secuenciadas por un reloj de tiempo real.
Una RTU cuenta con módulos de entradas/salidas los cuales son conectados al sistema de instrumentación y control local. Los módulos de entrada tienen como función adquirir la información suministrada por la instrumentación de campo y el sistema de control local y, acondicionarla a los niveles de operación adecuados.
Los módulos de salida tienen como función dar al proceso las señales de control, digitales o analógicas, provenientes del sistema SCADA. Las mismas siguen el proceso inverso que en el módulo de entrada, ya que de formato binario deben ser transformadas a los niveles adecuados de campo para las señales discretas y en un valor proporcional a la acción de control en señales de control analógico.
No hay comentarios:
Publicar un comentario